|
Update May 2023: I have started a new position as Senior Software Engineer in Perception at Oxa Autonomy. Before joining Oxa I was a research scientist at Inria Grenoble Rhône-Alpes (team CHROMA), France, where I worked on computer vision and machine learning for autonomous driving applications. Between 2015-2019 I did a PhD in robotics at Inria under the supervision of Christian Laugier and Jilles Dibangoye, with funding from Toyota Motor Europe. Before Inria, I earned an MSc in Machine Learning from University College London and worked as a research engineer at the Institute of Robotics and Mechatronics of the German Aerospace Center (DLR). Email / Google Scholar / Github / LinkedIn |

|
|
My general interests are computer vision, machine learning and robotics. More particularly, in the field of autonomous driving, I'm interested in environment perception (detection, tracking, segmentation), scene prediction, and motion planning. |
| Papers on motion forecasting and motion planning | |
|
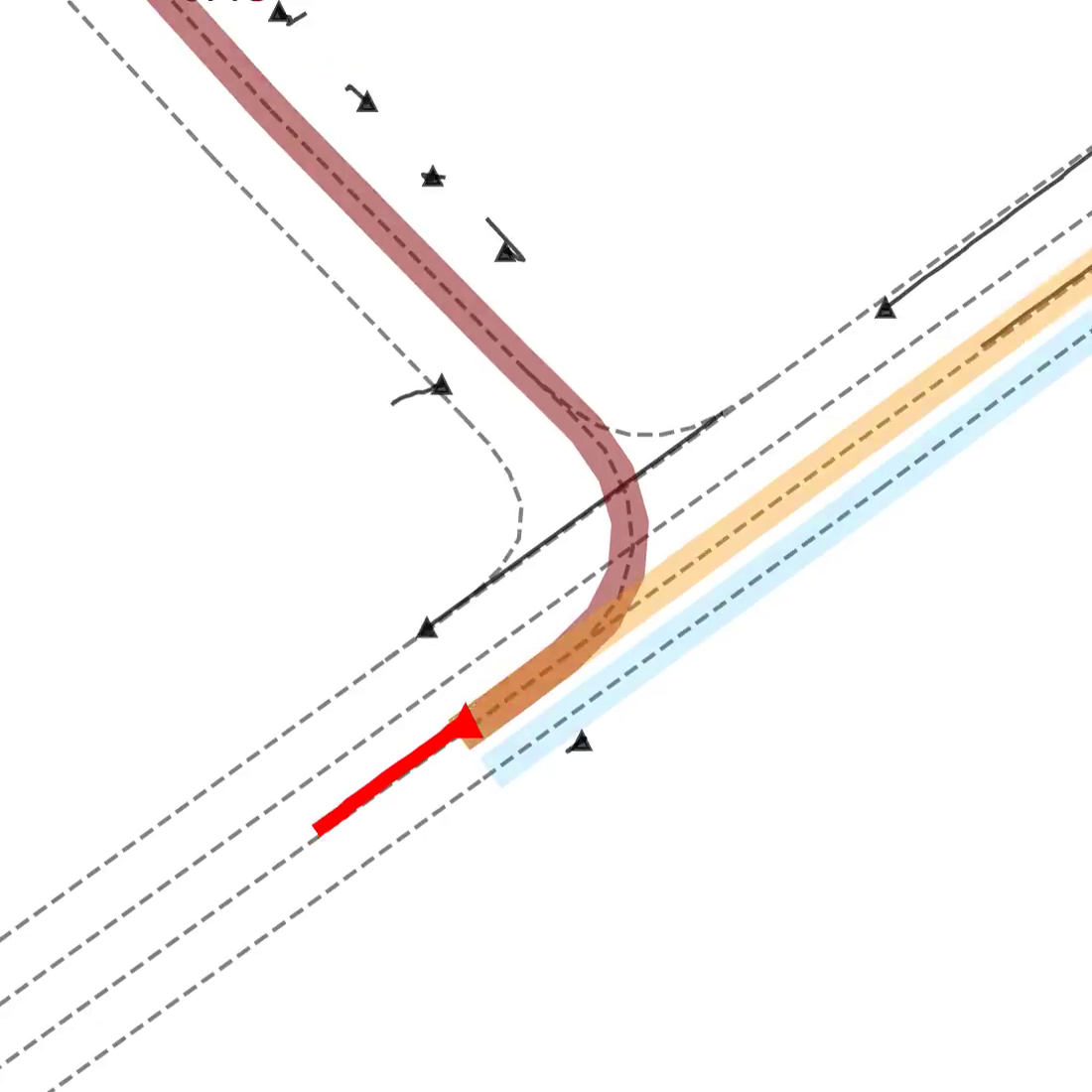
David Sierra-Gonzalez, Anshul Paigwar, Ozgur Erkent, Christian Laugier ITSC, 2022 pdf / video A Graph Neural Network is used to predict the centerline that the target intends to follow. Based on that, we predict a distribution over potential endpoints, and multiple lane-oriented trajectory realizations. |
|
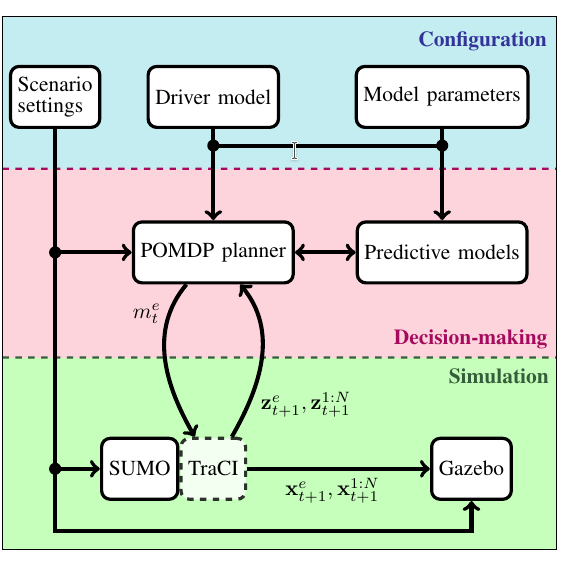
David Sierra-Gonzalez, Mario Garzon, Jilles Dibangoye, Christian Laugier ITSC, 2019 POMDP with Monte-Carlo simulations for lane change decision making. The environment predictions are done with our models from 2016-2017. |
|
David Sierra-Gonzalez, Ozgur Erkent, Victor Romero-Cano, Jilles Dibangoye, Christian Laugier ICRA, 2018 pdf / video Inverse Reinforcement Learning to learn a driver behavioral model on a real setting. |
|
David Sierra-Gonzalez, Victor Romero-Cano, Jilles Dibangoye, Christian Laugier ITSC, 2017 pdf / video A driver behavioral model learned with Inverse Reinforcement Learning is used as a prior to limit the false positives of an autoregressive model in lane change scenarios. |
|
David Sierra-Gonzalez, Jilles Dibangoye, Christian Laugier ITSC, 2016 A driver behavioral model learned with Inverse Reinforcement Learning in simulation is used to predict future road occupancy on a synthetic, simplified highway setting. |
| Papers on object detection | |
|
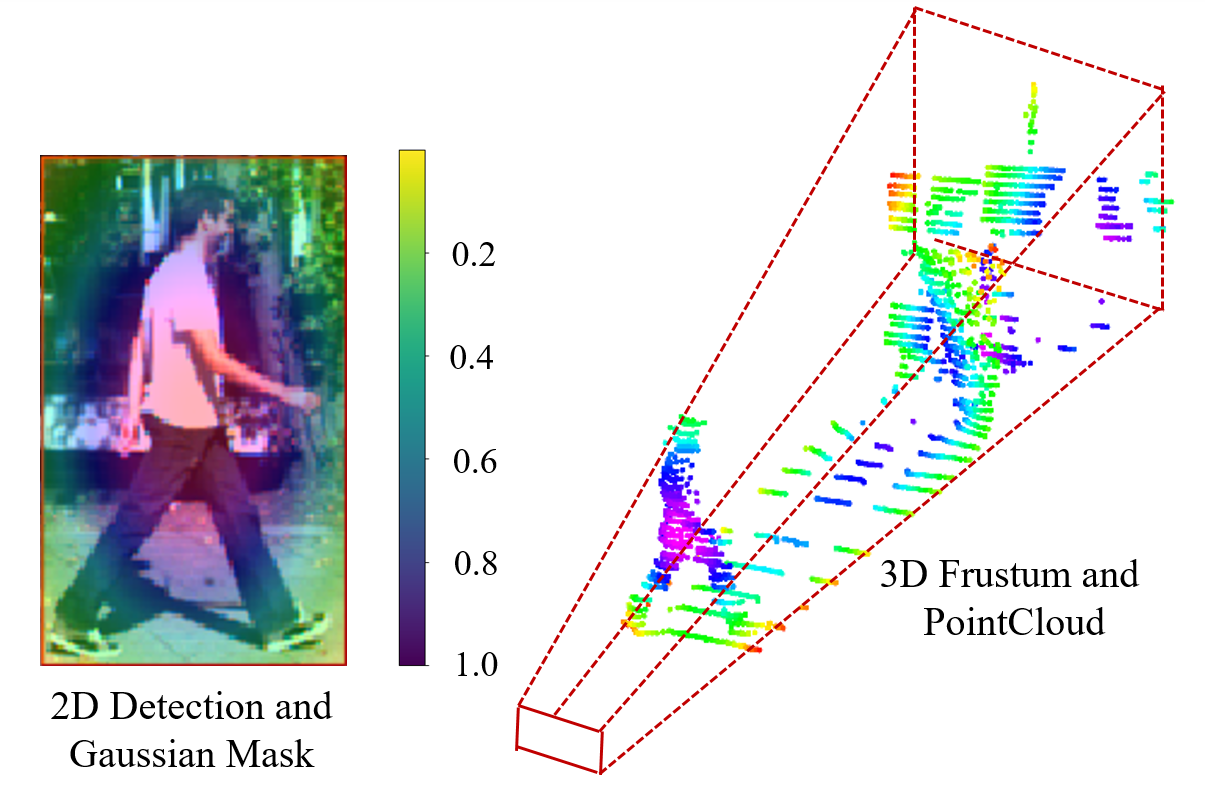
Anshul Paigwar, David Sierra-Gonzalez, Ozgur Erkent, Christian Laugier ICCV, Workshop on Autonomous Vehicle Vision, 2021 pdf / video / code Search space reduction for the PointPillars detection architecture based on 2D detections. At the time of submission F-Pointpillars ranked among the top-5 approaches for BEV pedestrian detection on the KITTI dataset. |
|
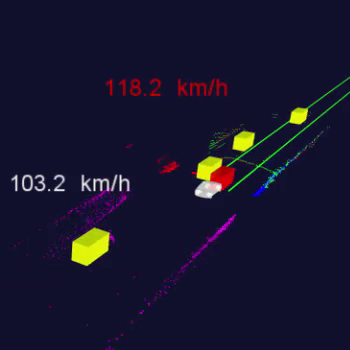
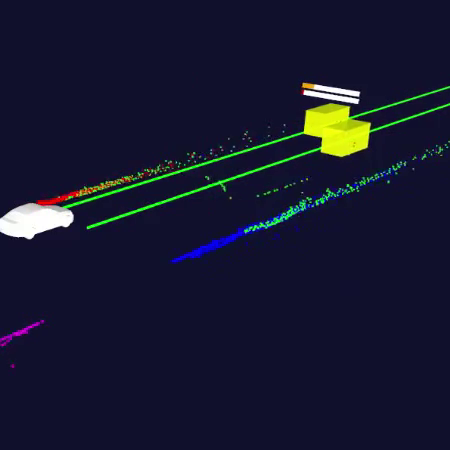
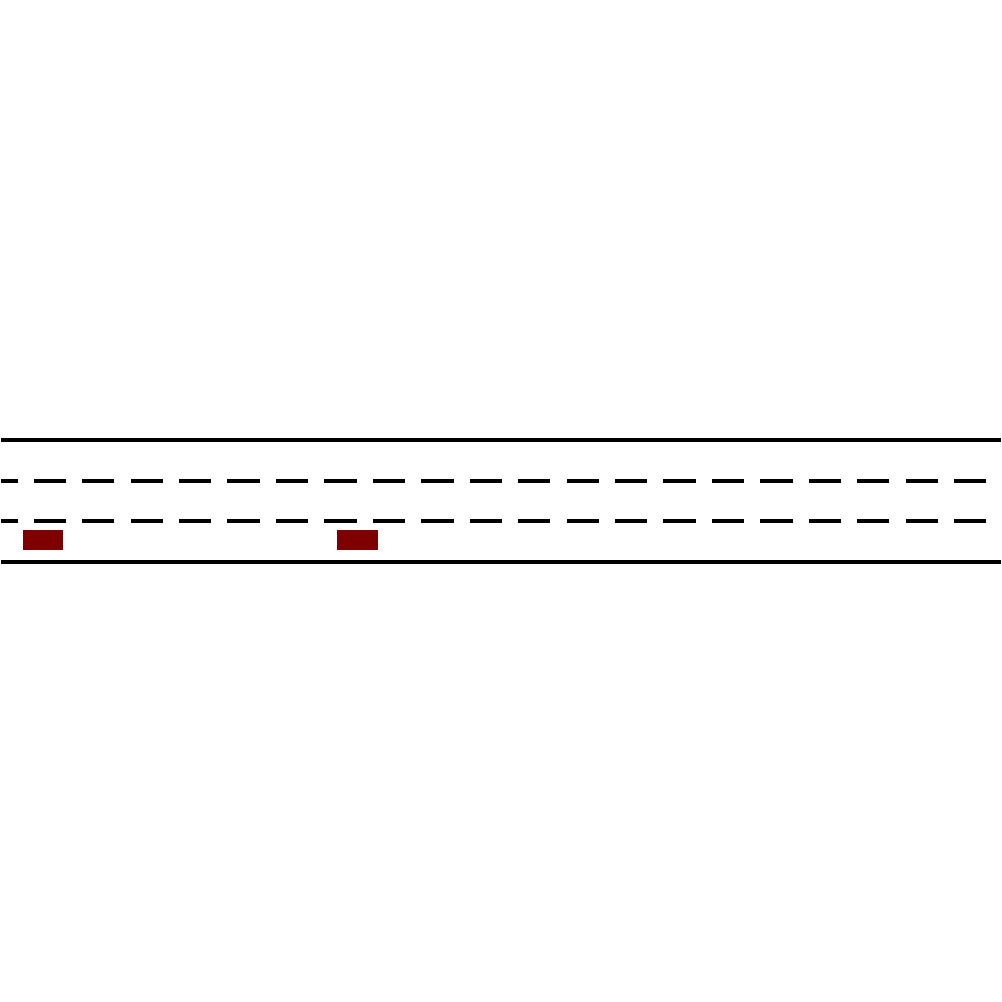
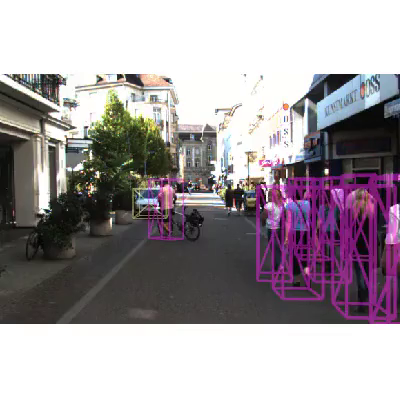
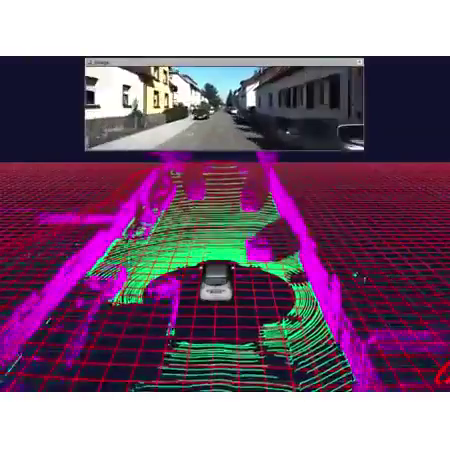
David Sierra-Gonzalez, Anshul Paigwar, Ozgur Erkent, Jilles Dibangoye, Christian Laugier ICARCV, 2020 pdf / video / dataset We process sequences of point clouds to obtain dynamic occupancy grids, and feed these to a 3D object detection architecture. By leveraging the grid's dynamic information, the bounding box localization and orientation metrics for small objects such as pedestrians in challenging scenarios are improved by 7% and 27%, respectively. |
| Papers on semantic grids and environment perception | |

|
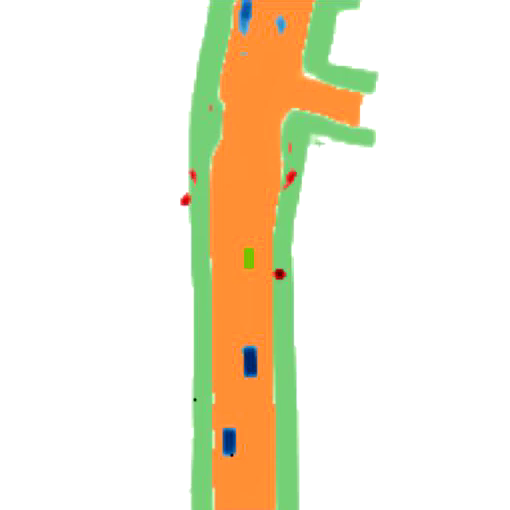
Manuel Diaz-Zapata, David Sierra-Gonzalez, Ozgur Erkent, Jilles Dibangoye, Christian Laugier ICRA, 2023 pdf / video Architecture that augments multi-camera feature maps at different scales with depth information from LiDAR to produce bird's eye view semantic grids of the environment. |
|
Gustavo Salazar-Gomez, Anshul Paigwar, Wenqian Liu, Ozgur Erkent, Manuel Diaz-Zapata, David Sierra-Gonzalez, Christian Laugier ICARCV, 2022 pdf / video Architecture that fuses multi-camera and LiDAR data at different scales with self-attention to produce bird's eye view semantic grids of the environment. |
|
Manuel Diaz-Zapata, Ozgur Erkent, Christian Laugier, Jilles Dibangoye, David Sierra-Gonzalez ICARCV, 2022. Architecture that fuses multi-camera and LiDAR data by projecting the point-cloud onto an intermediate RGB feature map to produce bird's eye view semantic grids of the environment. |
|
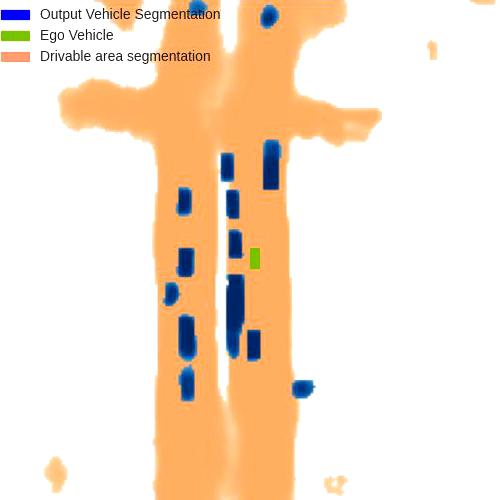
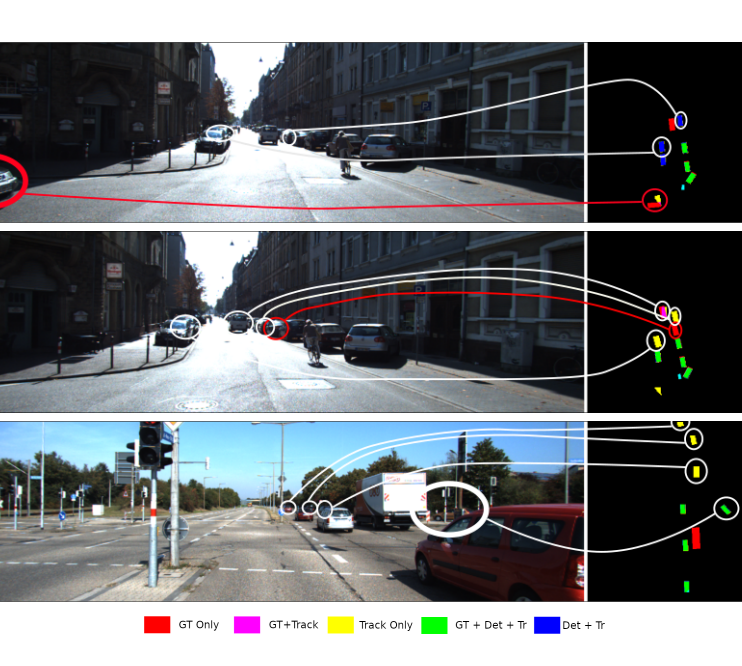
Ozgur Erkent, David Sierra-Gonzalez, Anshul Paigwar, Christian Laugier ICCVS, 2021 Multi-Object tracking architecture that leverages dynamic occupancy grids to improve the tracking of occluded targets. It outputs a bird's eye view instance segmentation of the scene. |
|
Anshul Paigwar, Ozgur Erkent, David Sierra-Gonzalez, Christian Laugier IROS, 2020 pdf / video / code Application of a Pillar Feature Encoding module to ground height prediction and point cloud segmentation. |
|
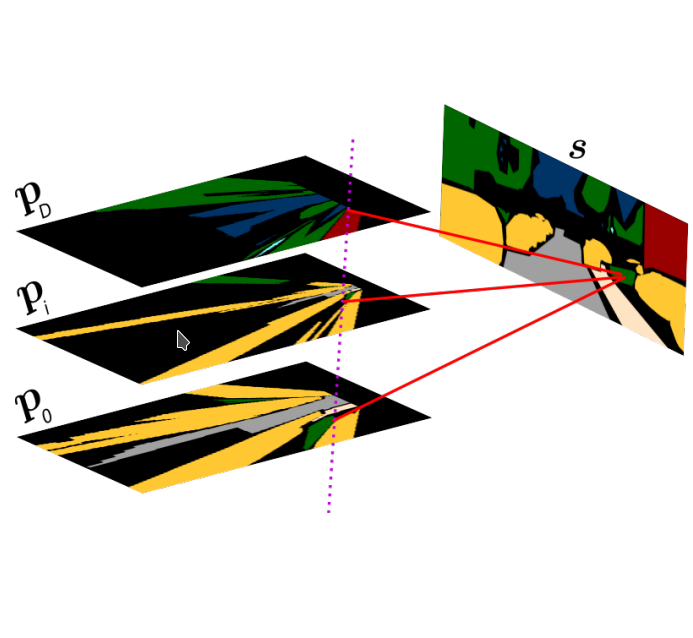
Ozgur Erkent, Christian Wolf, Christian Laugier, David Sierra-Gonzalez, Victor Romero-Cano IROS, 2018 pdf, video Architecture for semantic grid prediction through fusion of semantically segmented RGB images and Bayesian occupancy grids. |
| Papers on human-machine interfaces | |
|
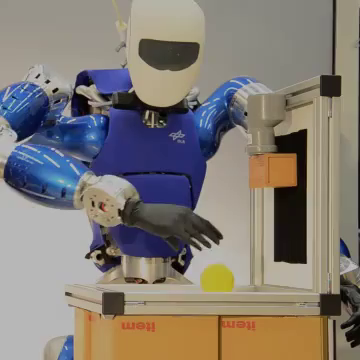
Arjan Gijsberts, Rashida Bohra, David Sierra-Gonzalez, Alexander Werner, Markus Nowak, Barbara Caputo, Maximo Roa, Claudio Castellini Frontiers in Neurorobotics, 8(8), 2014 pdf / video Incremental Ridge Regression and an approximation of the Gaussian Kernel known as Random Fourier Features are combined to predict finger forces from myoelectric signals, both finger-by-finger and grouped in grasping patterns. |
|
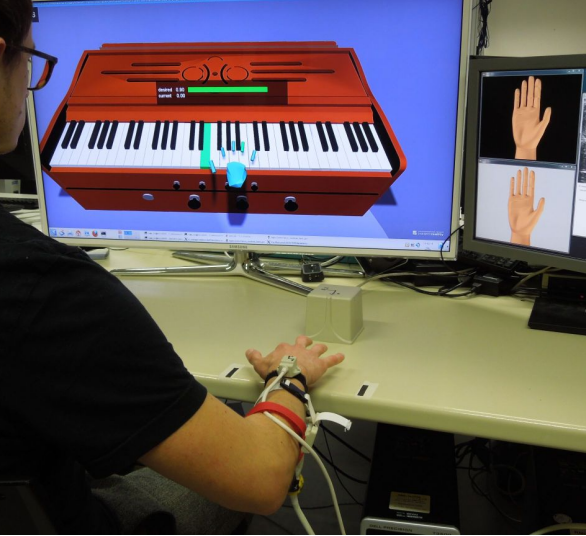
Claudio Castellini, Katarina Hertkorn, Mikel Sagardia, David Sierra-Gonzalez, Markus Nowak BioRob, 2014 Our ultrasound human-machine interface from 2013 is evaluated in a user study with 10 participants; the subjects are asked to play different sequences of keys in a piano. |
|
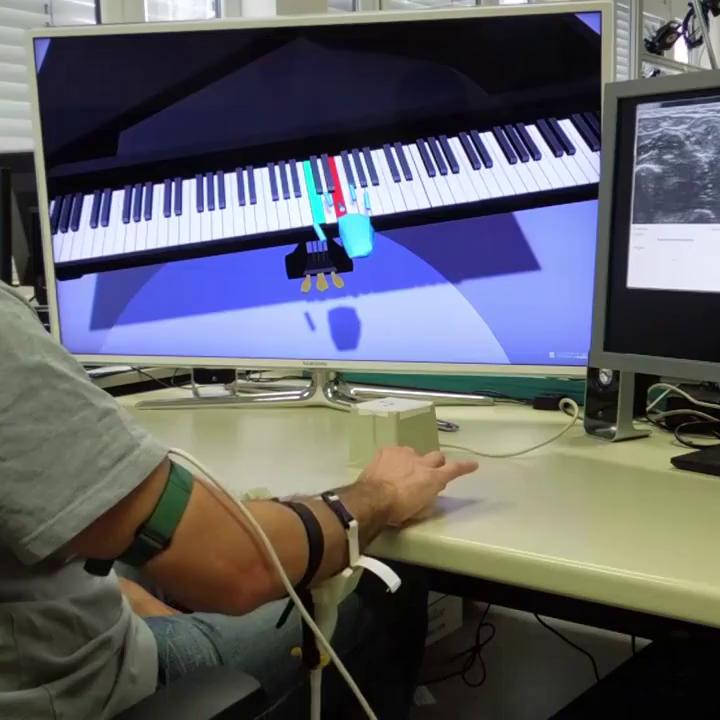
Mikel Sagardia, Katarina Hertkorn, David Sierra-Gonzalez, Claudio Castellini ICRA, 2014 pdf / video Application of our ultrasound human-machine interface to remotely control a virtual piano playing environment in real-time. |
|
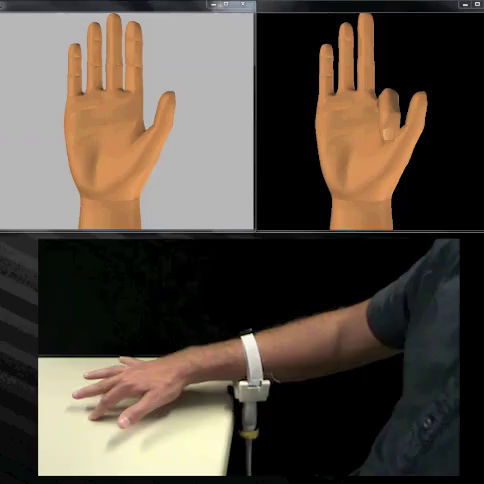
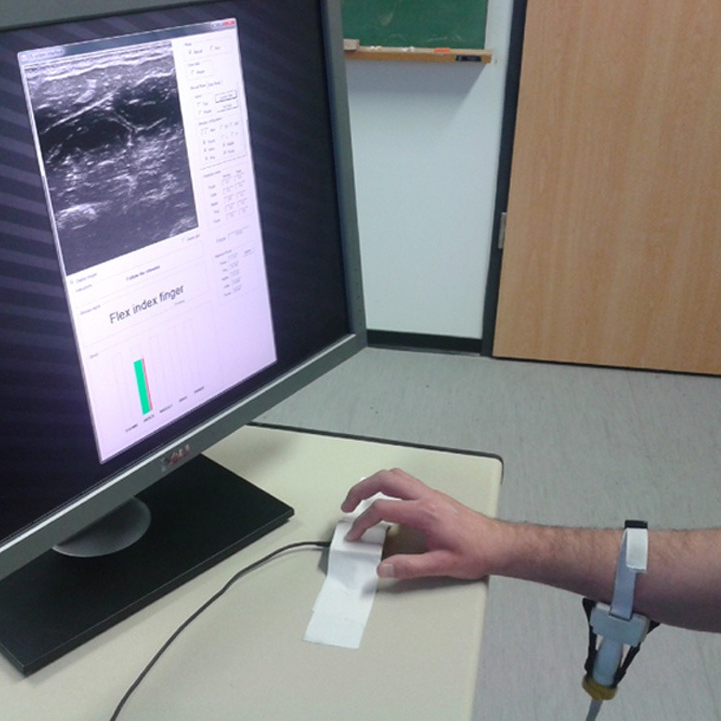
David Sierra-Gonzalez, Claudio Castellini Frontiers in Neurorobotics, 7(17), 2013 pdf / video Incremental Ridge Regression is used to enable on-the-fly retraining of the ultrasound-driven interface. A quick data collection of zero and maximum fingertip forces suffices to train a system that predicts intermediate force values spanning a range of 20N per finger. |
|
Claudio Castellini, David Sierra-Gonzalez IROS, 2013 Ridge Regression is used to map a live feed of ultrasound images of the forearm to fingertip forces. |
This website uses a template created by Jon Barron.